От проводов в дороге до Tesla. Когда мы пересядем на машины с автопилотом
От проводов в дороге до Tesla. Когда мы пересядем на машины с автопилотом
«Была бы технология, а применение ей найдется». Но все же сперва надо поставить задачу, а затем искать пути ее решения: нельзя просто придумать что-то и гадать, где это пригодится. Ученые и инженеры выдвигают гипотезы, исследуют теоретические предпосылки, проверяют идеи, пытаются их воплотить. Иногда открытия, которые считаются передовыми, какое-то время назад уже упоминались, хотя речь о компьютерах и высоких технологиях тогда не шла. Onliner.by в партнерстве с компанией Huawei разбирается в истории создания умных автопилотов.
Содержание
- Автопилот. Начало
- Провода в дороге. Утопия «автоматической магистрали»
- Citroen DS19 с пневмоподвеской. Первый полноценный автопилот
- Компьютерное зрение. Машиной должен управлять компьютер
- 100 км/ч. Наконец без проводов
- Рождение ALVINN. Нейронные сети
- Миллион долларов за действующий автопилот
- В дело вступает Google
- Tesla показала Autopilot
- Без ИИ и ни туда и ни сюда
- А что в Беларуси?
Автопилот. Начало
Давайте вспомним детство — то время, когда все вокруг кажется новым, неизведанным и полным тайн, когда фокус с «отрыванием» пальца вызывает бурю восторга и желание видеть это вновь и вновь. А еще взрослые рассказывают детям сказки, да только вот прав был Пушкин-чертяка: «Сказка ложь, да в ней намек! Добрым молодцам урок».
Немного переиначим известный сюжет: Емеля шантажирует ученого Щуку, ведущего затворнический образ жизни, и получает в свое распоряжение секретные технологии. Будучи по натуре ленивым, Емеля заставляет Щуку разработать самодвижущиеся сани, а позже — куда более комфортную печь.

Идея автономных транспортных средств обрела черты в первой половине прошлого века. В 1925 году американский изобретатель Франсис Гудина показал радиоуправляемый автомобиль на базе Chandler. Со стороны казалось, что машина едет сама — ведь за рулем никого не было, так как водитель сидел в другом автомобиле позади, откуда по радио переключал скорости, жал на клаксон и рулил.

Понимая, что управлять машиной, хоть и удаленно, но в непосредственной близости от нее не слишком эффективно, инженеры придумали способ обойти ограничение. Шаг вперед сделал футурист и промышленный дизайнер Бел Геддес, предложив дорогу с проложенными в ней проводами.
Провода в дороге. Утопия «автоматической магистрали»
Совместно с General Motors на выставке Futurama в 1939 году инженер показал прототип системы с электрическими автомобилями, находившими путь благодаря электромагнитной индукции (между собой взаимодействовали катушки в машине и встроенные в дорожное полотно кабели). В 1940-м Геддес выпустил книгу, в которой утверждал: люди не должны сидеть за баранкой — для того, чтобы сберечь жизни. По его прогнозам будущее должно было наступить в 60-х годах XX века.

В послевоенные годы желание сделать автомобиль и дорогу единым целым вернулось, Бел работал не зря. К делу подключилась компания RCA — та самая, благодаря которой появились разъемы типа «тюльпан», а также оригинальная телевизионная испытательная таблица. В лаборатории развернули миниатюрный тестовый полигон с игрушечной машинкой и проводами в полу, ставшими в прямом смысле путеводной нитью — был реализован описанный выше принцип организации «автоматической дороги».
«Очень круто!» — подумали местные чиновники, ответственные за местные дороги, и предложили реализовать полноразмерный проект — с настоящими дорогами и автомобилями.
Инженеры согласились. Чтобы дополнительно впечатлить комиссию, демонстрация проводилась вначале с помощью Chevrolet Impala 1958 года, а затем — футуристичного по тем временам концепта Firebird III. Все бы хорошо, но… «Очень дорого!» — сказали чиновники. На оснащение одной мили дороги требовалось $100 тыс. (около $860 тыс. на сегодняшний день), поэтому «автоматизированная магистраль» к 1975 году, как планировалось изначально, не появилась.

Citroen DS19 с пневмоподвеской. Первый полноценный автопилот
В 1960-х годах тренд подхватили другие компании, проводились испытания, однако подход все время оставался один: в тандеме должны работать автомобили и дорогостоящая инфраструктура вокруг.



Первой машиной с полноценным автопилотом, вероятно, стал Citroen DS19. В рамках реализуемого в Великобритании проекта инженеры модернизировали гидравлическую систему автомобиля, приспособив ее для воздействия на педали и руль. Транспортное средство без участия человека удерживало дорогу с проложенными в ней «проводами» на скорости около 130 км/ч даже на заснеженной трассе. Эффективно, однако вновь слишком дорого.
Компьютерное зрение. Машиной должен управлять компьютер
Затем в дело вступил Джон МакКарти, о котором мы рассказывали раньше. Он, напомним, является автором термина Artificial Intelligence, введенного в 1955 году, а также разработчиком языка программирования Lisp для ИИ.
В 1969 году ученый опубликовал эссе «Управляемые компьютером автомобили» (Computer-Controlled Cars). В нем автор рассуждает на тему «автоматизированного шофера», способного водить автомобиль на дорогах общего пользования, опираясь на визуальную информацию с камер. Ввод маршрута МакКарти предлагал осуществлять с помощью клавиатуры, она же применялась бы для ввода текущих команд (притормозить возле бара, например).
МакКарти указал направление, в котором необходимо двигаться инженерам. Правда, до начала 90-х годов прошлого века его идеи оставались концептом, пока кто-то не вспомнил нейронные сети в привязке к автономным автомобилям.
100 км/ч. Наконец без проводов
В 1980-х годах попытки разработать самоуправляемые машины все же предпринимались. Успевший поработать в NASA инженер Эрнст Дикманнс (хотя основных высот он добился на родине), которого называют «немецким пионером компьютерного зрения», сконструировал свое детище — VaMoRs на базе, судя по всему, Mercedes-Benz L 508 D.

Установленная в бусе аппаратура управляла автомобилем, получая информацию в режиме реального времени с камер. Программное обеспечение занималось обработкой последовательностей изображений и переводило увиденное в команды, а робот «рулил». Первые полностью автономные заезды обновленных VaMoRs начались в 1986 году, а максимальная скорость движения достигала почти 100 км/ч. Правда, на пустой дороге.

В конце 1986 — начале 1987 года была развернута программа Prometheus Project с прицелом на создание самостоятельно передвигающегося автомобиля. Финансированием проекта занялось европейское агентство координации исследований EUREKA, которое выделило около 750 млн евро в эквиваленте.
Было решено отказаться от ранее предложенной технологии размещения в дороге «навигационных» кабелей и взять за основу работу Эрнста Дикманнса с его машинным зрением. Позже благодаря Prometheus у компании Mercedes появился прототип VITA — Vision Information Technology Application (технология с помощью компьютерного зрения анализирует положение автомобиля на дороге и управляет им).
Проблема заключалась не только в ограниченной по тем временам вычислительной мощности компьютеров, но и в их размерах. Ведь не зря испытания проводились на грузовом бусе — кузов отдали под аппаратуру и кондиционеры для ее охлаждения. К слову, GPS также был недоступен простым смертным, поэтому необходимо было обеспечить хранение карт местности. Новая цель — уменьшить все оборудование до приемлемых габаритов.
В октябре 1994 года пара машин Mercedes, в том числе Mercedes-Benz 500 SEL, проехала на скорости до 130 км/ч по магистрали в обычном для дороги трафике, самостоятельно меняя полосы и опережая другие автомобили (с подтверждением действий со стороны водителя). А в 1995-м робот, разглядывая дорогу саккадами (постоянный беглый осмотр окружения) и утилизируя доступные мощности многопроцессорной системы, разогнался уже до 175 км/ч, проехав более 1,5 тыс. км. Максимальная дистанция, преодоленная машиной без участия человека, составила на этом маршруте 158 км.
Рождение ALVINN. Нейронные сети
В 1980-х работы велись и в США при финансировании DARPA. Американский проект получил название ALV — Autonomous Land Vehicle. Их основным достижением стала разработка системы навигации, способной управлять автомобилем при движении по пересеченной местности, а не по асфальтированной дороге с четкой разметкой. Компьютер, используя карту и сенсоры, разогнал машину до 3 км/ч и проехал около 600 метров. Пока немного.
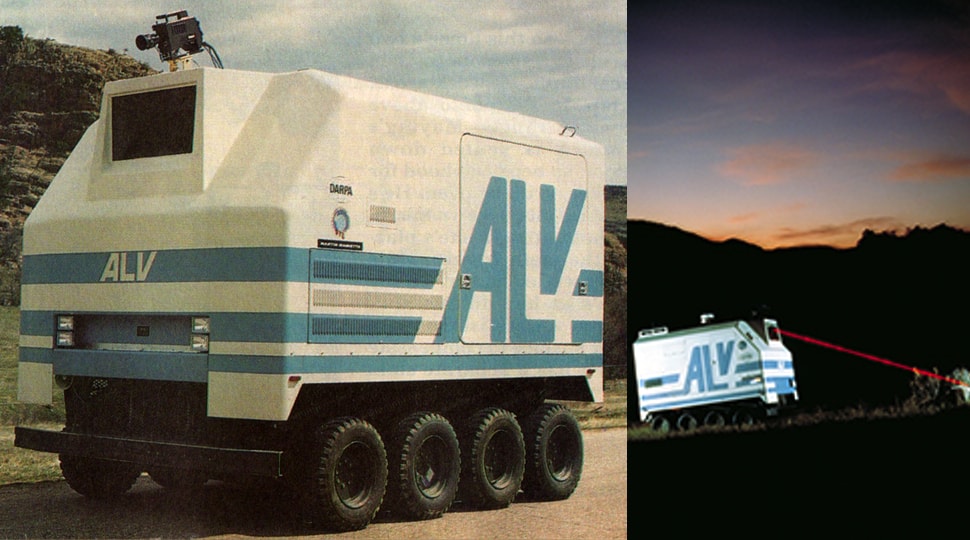
Это было начало для ALVINN — так именовали броневичок, ставший базой для новой технологии. Название транспортного средства состоит из двух аббревиатур — ALV и NN (Neural Network, или нейронные сети). Идею применения нейронных сетей продвинул Университет Карнеги — Меллона и его учащийся Дин Померло в частности. Тогда он завершал очередной этап образования со специализацией в машинном обучении, машинном зрении, робототехнике и нейронных сетях.

Тренировка автопилота ALVINN, ставшая классикой, выглядела так: водитель-человек проводил автомобиль по отрезку пути, в это время камеры собирали данные вокруг, фиксировались действия водителя. Компьютер определял различные параметры взаимодействия человека и машины, получая ответ на вопрос «что нужно делать, чтобы удержать автомобиль на дороге» для разных ситуаций.
Каждая нейронная сеть обучалась для определенного типа дороги, а затем ALVINN был способен подобрать нужную, опираясь на оценку ее эффективности и надежности в конкретном случае. Собственно обучение занимало пару минут, после чего компьютер с производительностью в десятую часть от возможностей процессора умных часов Apple, действовал самостоятельно. Человеку оставалось только жать на педали.
Миллион долларов за действующий автопилот
Следующие шаги по совершенствованию технологии были предприняты в начале 2000-х годов. Американское правительство запустило несколько проектов с участием армии и агенства DARPA. Агентство, свою очередь, в 2004-м предложило миллион долларов за работающую систему управления, способную провести транспортное средство по многокилометровому маршруту в пустыне Мохаве. Безуспешно.


Вторая и третья попытки в рамках Grand Challenge были эффективнее, а в 2007 году победу в городских условиях одержал автомобиль Университета Карнеги — Меллона и General Motors. Уже тогда стало понятно, что набора из пары камер и компьютера недостаточно, на что указали первые два Grand Challenge. Заодно были сформированы «клубы по интересам», тема автономных машин получила широкое распространение.
В дело вступает Google
И вот в 2009 году в дело вступила Google. Пока тайно, позвав возглавить проект Себастьяна Труна. Он участвовал в соревнованиях DARPA Challenge II и III и занял высокие места, к тому же был директором Лаборатории искусственного интеллекта в Стэнфорде.
Здесь сделаем отступление. Принцип поиска пути у современных автономных транспортных средств примерно одинаковый. Сенсоры постоянно собирают информацию вокруг, генерируя карту. Могут использоваться уже готовые карты.
Речь, как правило, идет о наборе лазеров, радарах разного типа, сонарах, GPS, камерах высокого разрешения и внутренних сенсорах. Лазер, к примеру, измеряет расстояние до предметов и их габариты; радары и сонары применяются для адаптивного круиз-контроля, но также нужны для определения дистанции; камеры получают изображения для последующего их изучения компьютером (знаки, разметка и т. д.). Затем программное обеспечение анализирует поступающие данные, руководствуется как жестко заданными правилами, так и наборами меняющихся алгоритмов, предсказательными моделями, различает предметы, важные для дальнейших действий, или игнорирует их.
На основании полученной и обработанной информации автомобиль осуществляет дальнейшие действия на дороге, все решения принимаются за доли секунды (те же мотоциклисты всегда появляются из ниоткуда).
Машины могут действовать в составе «роя» — этот принцип, напомним, в несколько ином виде считался одним из основных на заре развития самоуправляемых механизмов. В «рое» автомобили способны формировать плотную колонну (перевозка грузов) или действовать еще более глобально — на уровне всего транспорта какого-нибудь города (но лишь в весьма отдаленной перспективе).
Степень автономности оценивается по шкале от 0 до 5. На нулевом уровне все основные системы контролируются человеком; на первом некоторые системы, но не более одной в конкретный период времени, могут управляться электроникой; на втором машина берет ответственность за несколько компонентов управления; на третьем она способна управлять сам собой, но в некоторых ситуациях передает управление человеку; на четвертом достигается полная автономность в ограниченном количестве сценариев; пятый уровень, к которому все стремятся, подразумевает автономность в любых условиях.
Теперь вернемся к Google. Компания ставила перед собой задачу выпустить автономную машину к 2020 году. Проект начался с шести автомобилей Toyota Prius и Audi TT. Ими управляли люди с безупречной историей вождения, чтобы система перенимала исключительно корректные модели поведения.

Машины оборудовали набором сенсоров, радаров и датчиков, необходимых для наблюдения за окружением. К 2010 году эти автомобили проехали более 225 тыс. км, фиксируя всевозможные ситуации, с которыми только можно встретиться на дороге. Компания Google, впрочем, не слишком распространялась о своем проекте, но на улицах на смену «Приусам» пришли «Лексусы».

А в 2014 году общественности были представлены прототипы автономных машин Google — эдакие «божьи коровки» без руля и педалей, только с парой сидений, кнопкой включения да стойкой с сенсорами на крыше. Названные Firefly («Светлячок»), они предназначались для испытаний, но не массового производства.

Достижения поисковой корпорации не давали покоя крупным автопроизводителям, в игру включились практически все (а кто-то продолжил изыскания).
Tesla показала Autopilot
В 2014 году Tesla представила свой Autopilot, подняв по обыкновению хайп вокруг нового для себя направления. Вначале это была относительно простая система, состоящая из камеры под лобовым стеклом, смотрящего вперед радара, кругового ультразвукового сенсора и компьютера для обработки данных. Первая версия Autopilot отвечала требованиям второго уровня автономности.

Вторая версия обросла камерами, увеличив зону и дальность охвата, и получила более производительное «железо» от NVIDIA для обработки данных, а позже — разработанный в Tesla процессор. Однако это все еще сверхпродвинутый круиз-контроль. Подобный ему аналог существует и у Mercedes. Планировалось, что Audi A8 2019 будет отвечать третьему уровню автономности, но пока не сложилось. Весь вопрос в законах и программном обеспечении. Об этом говорят как представители Tesla, так и эксперты индустрии. По словам последних, компания Илона Маска достигла наибольшего прогресса в коммерциализации продукта.
Так называемый Enhanced Autopilot американской компании готов обеспечить пятый уровень автономности (но официально находится на втором), осталось лишь «накатить обновление», чем Tesla и занимается, постепенно совершенствуя ПО. На полигонах вовсю проводятся испытания системы, которая действует намного эффективнее доступных владельцам электрокаров разработок.
Пока же обычные водители становятся заложниками собственных ожиданий, пытаясь увидеть в круиз-контроле Tesla полноценный автопилот. По этой причине мы регулярно читаем об авариях с участием электромобилей Маска — негативную роль здесь играет и агрессивный маркетинг бизнесмена. Несмотря на требование не отпускать руль, итог иногда весьма печален.
Конечно, нередко «Автопилот» помогает:
Google, тем временем, наступает на пятки — разработкой самоуправляемых машин теперь занимается ее дочернее предприятие Waymo. Технологии и гибридные системы обработки данных позволяют тестовым автомобилям действовать уже на четвертом уровне автономности, однако до дорог общего пользования они пока не добрались. В отличие от Tesla, которая отказалась от лидаров в пользу камер и машинного зрения, Waymo и Uber (также включившаяся в гонку автопилотов) используют активные оптические системы. Их недостаток — технологическое несовершенство и высокая цена.
Без ИИ никак
Эксперты считают, что внедрение в автопилоты искусственного интеллекта неизбежно. Продвинутый ИИ с подобием когнитивных функций будет способен имитировать человеческий стиль вождения. Зачем? Это вопрос комфорта. Также, полагают некоторые ученые, развитие концепции «интернета вещей» поспособствует появлению автопилотов пятого уровня — глобальная информационная сеть сможет генерировать еще больший объем данных для обработки.

В теории автономный транспорт может значительно снизить уровень аварийности, повысить эффективность доставки грузов, сделать личный транспорт не таким привлекательным, что, в свою очередь, повлияет на экологическую обстановку. Именно об этом говорили инженеры, только приступив к созданию автопилотов для машин.
Согласно краткосрочным прогнозам, наиболее активно автономные системы будут применяться в сфере железнодорожных и морских перевозок, доставки грузов на дорогах общего пользования, а также при организации движения городского общественного транспорта (испытания уже проводятся).
Сегодня разработкой умных автопилотов занимаются Waymo, Uber, Tesla и немыслимое количество стартапов. Основной их целью является создание алгоритмов обработки информации, так как «аппаратный вопрос» считается решенным. Подобные системы станут одним из компонентов глобальной инфраструктуры — постепенно от умных домов мы перейдем к умным улицам, городам и государствам, но об этом в следующий раз.

В Беларуси
Беларусь, судя по всему, не останется в стороне от современных тенденций. Один из резидентов индустриального парка «Великий камень» — «Международная технологическая компания „Интеллектуальное оборудование“», например, решает организационные вопросы касательно испытаний машин с автопилотом. Как напомнил Onliner.by первый заместитель гендиректора индустриального парка Кирилл Коротеев, автомобили, оборудованные системой беспилотного вождения, уже находятся на складе компании в Беларуси. Также получено разрешение на движение таких транспортных средств по территории индустриального парка, одновременно изучается законодательство для эксплуатации таких машин в целом по стране.
Кроме того, в Минске уже некоторое время реализуется программа по развертыванию элементов интеллектуальной транспортной системы. Ее цели, как и в прошлом у идейных вдохновителей и создателей первых автопилотов, — уменьшение количества ДТП, в том числе с участием пешеходов, распределение транспортных потоков (например, борьба с пробками, повышение средней скорости движения), снижение негативного влияния на экологию.
На словах звучит просто, на деле же проект подразумевает развертывание развитой инфраструктуры, которая способна, во-первых, вести постоянный анализ дорожной обстановки, реагируя на ее изменения (аварии) и предпринимая соответствующие действия для решения проблем, а во-вторых, прогнозировать инциденты и составлять оптимальные маршруты. Для сбора данных применяются видеокамеры, микроволновые датчики, Bluetooth-сенсоры и иное оборудование.
В теме искусственного интеллекта мы разбираемся вместе с Huawei. На IFA 2017 компания представила первую мобильную платформу для ИИ — чипсет Kirin 960. Позже технологии были использованы в смартфонах Mate 10Pro, P20 и P20Pro с камерой Leica. Алгоритмы камеры сами выставляют настройки для ночной съемки или под 19 других категорий, моделируют портреты, помогают с яркостью, детализацией и цветопередачей, дают советы по выстраиванию композиции фотографии.
Партнерский проект подготовлен при поддержке ООО «Бел Хуавэй Технолоджис» УНП 190835312.
Читайте также:
Тест Тьюринга, Робот Трясучка и Марвин Минский. Так зарождался искусственный интеллект
Наш канал в Telegram. Присоединяйтесь!
Быстрая связь с редакцией: читайте паблик-чат Onliner и пишите нам в Viber!
Перепечатка текста и фотографий Onliner.by запрещена без разрешения редакции. nak@onliner.by